Šioje animacijoje parodyta, kaip šviesa nuves kelią, kai ji atsitrenks į pirminį Jameso Webbo kosminio teleskopo (JWST) veidrodėlį ir atsispindi antriniame, o paskui per užpakalinį optinį mazgą, kur yra tretiniai ir smulkūs valdomieji veidrodėliai. Tada šviesa atsispindi, padalijama ir nukreipiama į mokslinius instrumentus nuimamais veidrodžiais. JWST yra trijų veidrodžių anastigmatinis teleskopas. Autoriai: NASA, ESA ir G. Baconas (STScI)
Šią savaitę prasidėjo tris mėnesius trukęs teleskopo derinimo procesas – ir paskutinę dieną Webb komandos nariai pamatė pirmuosius žvaigždžių šviesos fotonus, kurie skriejo per visą teleskopą ir buvo aptikti artimojo infraraudonųjų spindulių kameros (NIRCam) prietaisu. Šis etapas žymi pirmąjį iš daugelio žingsnių, leidžiančių užfiksuoti vaizdus, kurie iš pradžių buvo nefokusuoti, ir naudojant juos lėtai tikslinant teleskopą. Tai pati proceso pradžia, tačiau kol kas pirminiai rezultatai atitinka lūkesčius ir modeliavimą.
Inžinierių ir mokslininkų komanda iš Ball Aerospace, Kosminio teleskopo mokslo instituto ir[{” attribute=””>NASA’s Goddard Space Flight Center will now use data taken with NIRCam to progressively align the telescope. The team developed and demonstrated the algorithms using a 1/6th scale model telescope testbed. They have simulated and rehearsed the process many times and are now ready to do this with Webb. The process will take place in seven phases over the next three months, culminating in a fully aligned telescope ready for instrument commissioning. The images taken by Webb during this period will not be “pretty” images like the new views of the universe Webb will unveil later this summer. They strictly serve the purpose of preparing the telescope for science.
To work together as a single mirror, the telescope’s 18 primary mirror segments need to match each other to a fraction of a wavelength of light – approximately 50 nanometers. To put this in perspective, if the Webb primary mirror were the size of the United States, each segment would be the size of Texas, and the team would need to line the height of those Texas-sized segments up with each other to an accuracy of about 1.5 inches.
Scottas Actonas ir Chanda Walker iš „Ball Aerospace“ kartu su Lee Feinbergu iš NASA Goddard atlieka pagrindinius toliau nurodytus veiksmus.
„Pabaigus veidrodžio segmentų išdėstymą ir įjungus prietaisus, komanda pradėjo daugybę žingsnių, reikalingų teleskopui paruošti ir sukalibruoti, kad jis atliktų savo darbą. Teleskopo paleidimo procesas užtruks daug ilgiau nei ankstesnių kosminių teleskopų, nes pagrindinis Webb veidrodis susideda iš 18 atskirų veidrodžio segmentų, kurie turi veikti kartu kaip vienas didelio tikslumo optinis paviršius. Eksploatacijos paleidimo proceso etapai apima:
- Segmento vaizdo identifikavimas
- Segmentų lygiavimas
- Vaizdų krovimas
- Grubus fazavimas
- Tikslus fazavimas
- Teleskopo išlygiavimas per instrumentų matymo laukus
- Pakartokite lygiavimą galutinei korekcijai
1. Segmento vaizdo identifikavimas
Pirmiausia turime suderinti teleskopą erdvėlaivio atžvilgiu. Erdvėlaivis gali atlikti itin tikslius nukreipimo judesius, naudodamas „žvaigždžių sekimo priemones“. Pagalvokite apie žvaigždžių sekiklius kaip apie erdvėlaivių GPS. Iš pradžių erdvėlaivio padėtis iš žvaigždžių sekėjų nesutampa su kiekvieno veidrodžio segmento padėtimi.
Mes nukreipiame teleskopą į ryškią, izoliuotą žvaigždę (HD 84406), kad užfiksuotume vaizdų seriją, kuri vėliau sujungiama ir susidaro tos dangaus dalies vaizdas. Tačiau atminkite, kad mes neturime tik vieno veidrodžio, žvelgiančio į šią žvaigždę; turime 18 veidrodžių, kurių kiekvienas iš pradžių yra pakreiptas į skirtingą dangaus dalį. Dėl to iš tikrųjų užfiksuosime 18 šiek tiek pasislinkusių žvaigždės kopijų – kiekviena nefokusuota ir išskirtinai iškraipyta. Šias pradines žvaigždžių kopijas vadiname „segmentiniais vaizdais“. Tiesą sakant, atsižvelgiant į pradinę veidrodžių padėtį, gali prireikti kelių iteracijų, kad būtų galima rasti visus 18 segmentų viename vaizde.
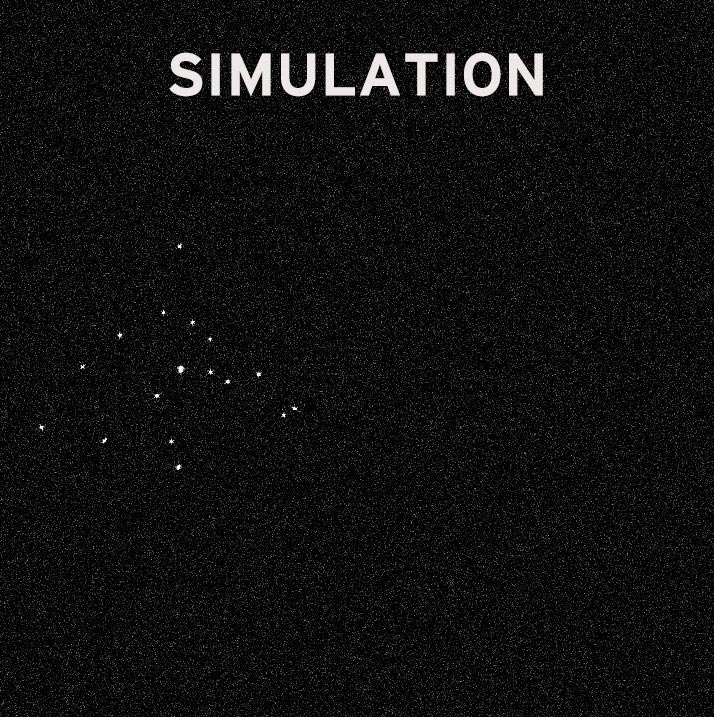
Imituotas galimo pradinio diegimo pavyzdys, rodantis 18 segmentų vaizdų. Autorius: NASA
Po vieną perkelsime 18 veidrodinių segmentų, kad nustatytų, kuris segmentas sukuria kurio segmento vaizdą. Suderinę veidrodžio segmentus su atitinkamais vaizdais, galime pakreipti veidrodžius, kad visi vaizdai būtų arti bendro taško tolesnei analizei. Šį išdėstymą vadiname „vaizdų masyvu“.
2. Segmentų lygiavimas
Kai turėsime vaizdo masyvą, galime atlikti Segment Alignment, kuris ištaiso daugumą didelių veidrodžio segmentų padėties nustatymo klaidų.
Pradedame nuo segmentų vaizdų fokusavimo, šiek tiek judindami antrinį veidrodį. Matematinė analizė, vadinama fazių paieška, taikoma nefokusuotiems vaizdams, siekiant nustatyti tikslias segmentų padėties nustatymo klaidas. Sureguliavus segmentus, gaunama 18 gerai pakoreguotų „teleskopų“. Tačiau segmentai vis tiek neveikia kaip vienas veidrodis.
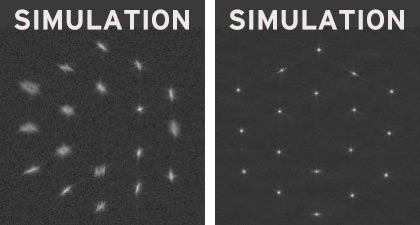
(Kairėje) Prieš: Imituotas pradinis vaizdų masyvas. (Dešinėje) Po: Imituotas 18 pataisytų segmentų masyvas. Autorius: NASA
3. Vaizdų krovimas
Kad visa šviesa būtų vienoje vietoje, kiekvienas segmento vaizdas turi būti sukrautas vienas ant kito. Vaizdo krovimo veiksme perkeliame atskirus segmentų vaizdus taip, kad jie tiksliai patektų į lauko centrą, kad gautume vieną vieningą vaizdą. Šis procesas paruošia teleskopą grubiam fazavimui.
Krovimas atliekamas iš eilės trijose grupėse (A segmentai, B segmentai ir C segmentai).
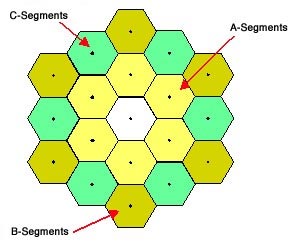
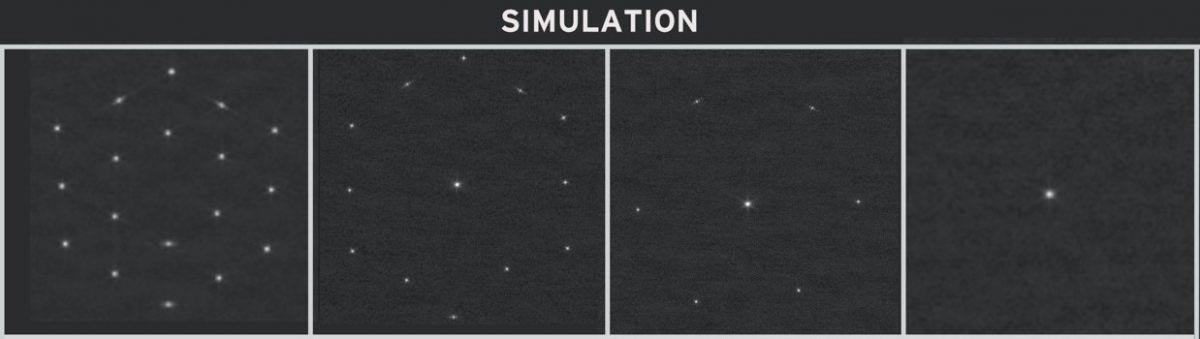
Vaizdų krovimo modeliavimas. Pirmasis skydelis: pradinio vaizdo mozaika. Antrasis skydelis: A segmentai sukrauti. Trečias skydelis: A ir B segmentai sukrauti. Ketvirtas skydelis: A, B ir C segmentai sukrauti. Autorius: NASA
4. Grubus fazavimas
Nors „Image Stacking“ visą šviesą deda ant detektoriaus vienoje vietoje, segmentai vis tiek veikia kaip 18 mažų teleskopų, o ne kaip vienas didelis. Segmentai turi būti išdėstyti vienas su kitu tikslumu, mažesniu už šviesos bangos ilgį.
Tris kartus per paleidimo procesą atliekama šiurkščia fazė matuoja ir koreguoja veidrodžio segmentų vertikalų poslinkį (stūmoklių skirtumą). Naudodami technologiją, žinomą kaip Dispersed Fringe Sensing, naudojame NIRCam, kad gautume šviesos spektrus iš 20 atskirų veidrodžio segmentų porų. Spektras skirsis panašiai kaip kirpėjo polių modelis, kurio nuolydis (arba kampas) nustatomas pagal dviejų suporuotų segmentų stūmoklį.
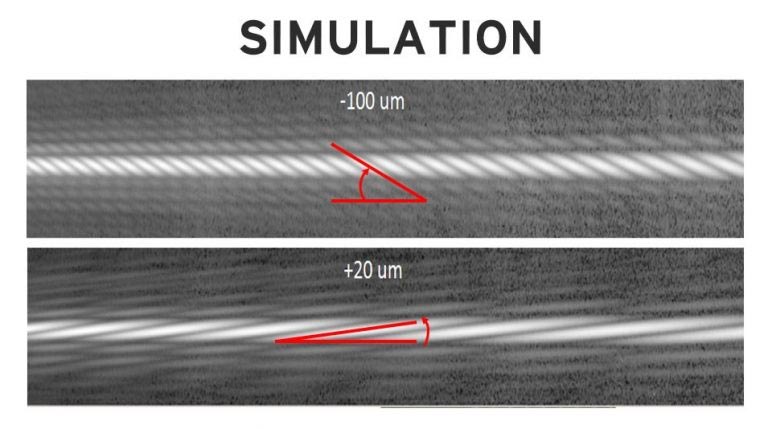
Šiame modeliavime „kirpėjo stulpo“ modelius sukuria „Disperse Fringe Sensor“, rodantis didelę stūmoklio klaidą (viršuje) arba mažą stūmoklio klaidą (apačioje). Autorius: NASA
5. Tikslus fazavimas
Tikslus fazavimas taip pat atliekamas tris kartus, iškart po kiekvieno stambaus fazavimo etapo, o paskui reguliariai per visą Webb gyvavimo laikotarpį. Šios operacijos išmatuoja ir ištaiso likusias lygiavimo klaidas, naudojant tą patį defokusavimo metodą, taikomą atliekant segmentų išlygiavimą. Tačiau, užuot naudoję antrinį veidrodį, mokslo prietaiso viduje naudojame specialius optinius elementus, kurie kiekvienam vaizdui įveda skirtingą defokusavimo kiekį (-8, -4, +4 ir +8 defokusavimo bangos).
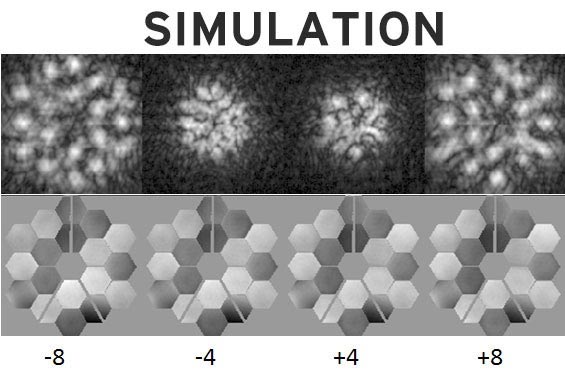
Sufokusuotų vaizdų, naudojamų tiksliam fazavimui, modeliavimas. Vaizdai (viršuje) rodo defokusavimą, įvestą į beveik išlygintą teleskopą. Analizė (apačioje) rodo klaidas, susijusias su kiekvienu teleskopo segmentu. Labai ryškių arba tamsių spalvų segmentams reikia didesnių pataisymų. Autorius: NASA
6. Teleskopo išlygiavimas virš instrumento matymo laukų
Po tikslaus fazavimo teleskopas bus gerai išlygiuotas vienoje NIRCam matymo lauko vietoje. Dabar turime išplėsti suderinimą su likusiais instrumentais.
Šiame paleidimo proceso etape atliekame matavimus keliose vietose arba lauko taškuose kiekviename mokslo instrumente, kaip parodyta toliau. Didesnis intensyvumo kitimas rodo didesnes klaidas tame lauko taške. Algoritmas apskaičiuoja galutines pataisas, kurių reikia, kad teleskopas būtų gerai suderintas visuose mokslo prietaisuose.
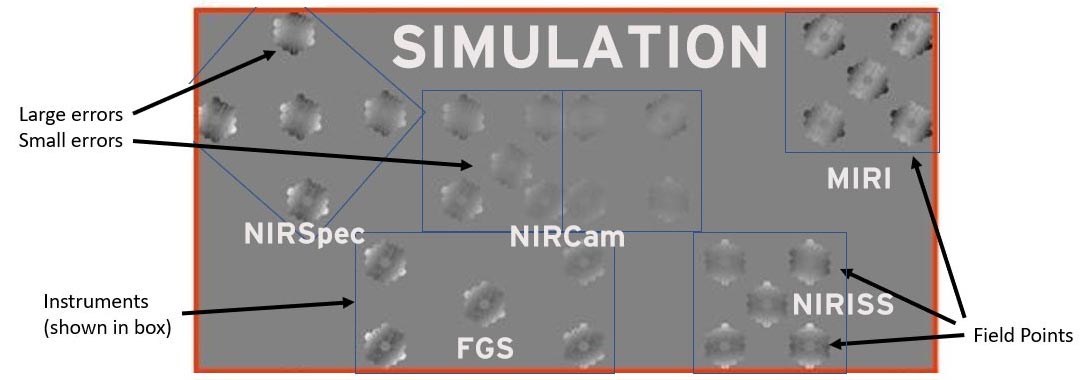
Imituota matymo lauko korekcijos analizė. Autorius: NASA
7. Pakartokite lygiavimą galutinei korekcijai
Pritaikius matymo lauko pataisą, svarbiausias dalykas, kurį reikia išspręsti, yra bet kokių mažų likusių padėties nustatymo klaidų pirminiuose veidrodžio segmentuose pašalinimas. Matuojame ir atliekame pataisymus naudodami Fine Phasing procesą. Atliksime galutinį kiekvieno mokslo instrumento vaizdo kokybės patikrinimą; kai tai bus patikrinta, bangos fronto jutimo ir valdymo procesas bus baigtas.
Atlikdami septynis veiksmus galime pastebėti, kad taip pat turime pakartoti ankstesnius veiksmus. Procesas yra lankstus ir modulinis, kad būtų galima kartoti. Po maždaug trijų mėnesių teleskopo sureguliavimo būsime pasirengę pradėti naudoti prietaisus.
Parašė Scottas Actonas, Webb vadovaujantis bangų fronto jutimo ir valdymo mokslininkas, Ball Aerospace; Chanda Walker, Webb bangų fronto jutimo ir valdymo mokslininkė, Ball Aerospace; ir Lee Feinbergas, Webb optinio teleskopo elementų vadovas, NASA Goddardo kosminių skrydžių centras.